16個のサーボモータを回す
【内容説明】
ソフトウェアPWMでサーボモータを制御します(タイマーWの機能を利用する)
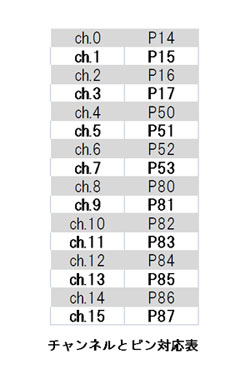
[ サーボ ]: P14-17,P50-53,P80-P87 --->16つのモータを制御可能
配列thetaに角度を入れてjointAngle()関数を実行すると配列の順番がサーボモータのチャンネルに対応して指令値を送る
たとえば
theta[0]はch0
theta[1]はch1
という風に。
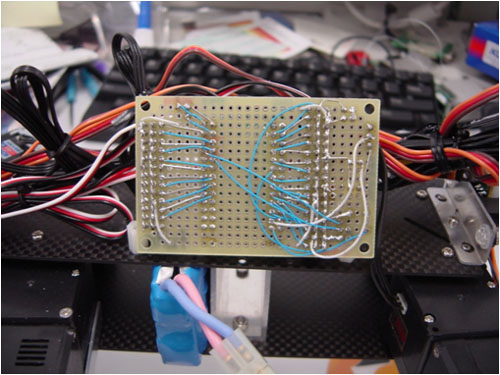
裏側の配線がこうなる。配線するだけなので特に決まりはないが、サーボモータのコネクタに合わせて
PWM信号線
電源6V(or7.2V※体験演習では9Vで扱ったが本当はダメ)
GND、
の順番にピンを立てて配線するとよい。
この場合はセンサを4個使っているのでANの端子(ADCポート)も引き出してある。
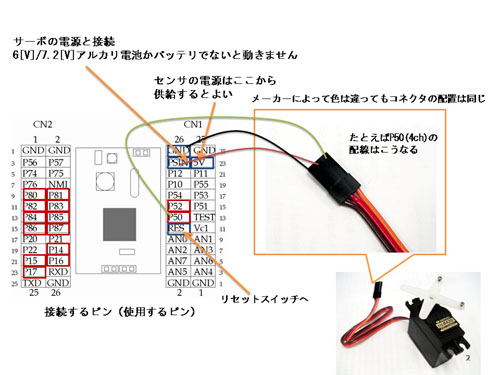
電源はH8の「PSIN」に入力するコト。するとH8キットの3端子レギュレータというチップによって5Vに変換されてマイコンの電源が供給される。