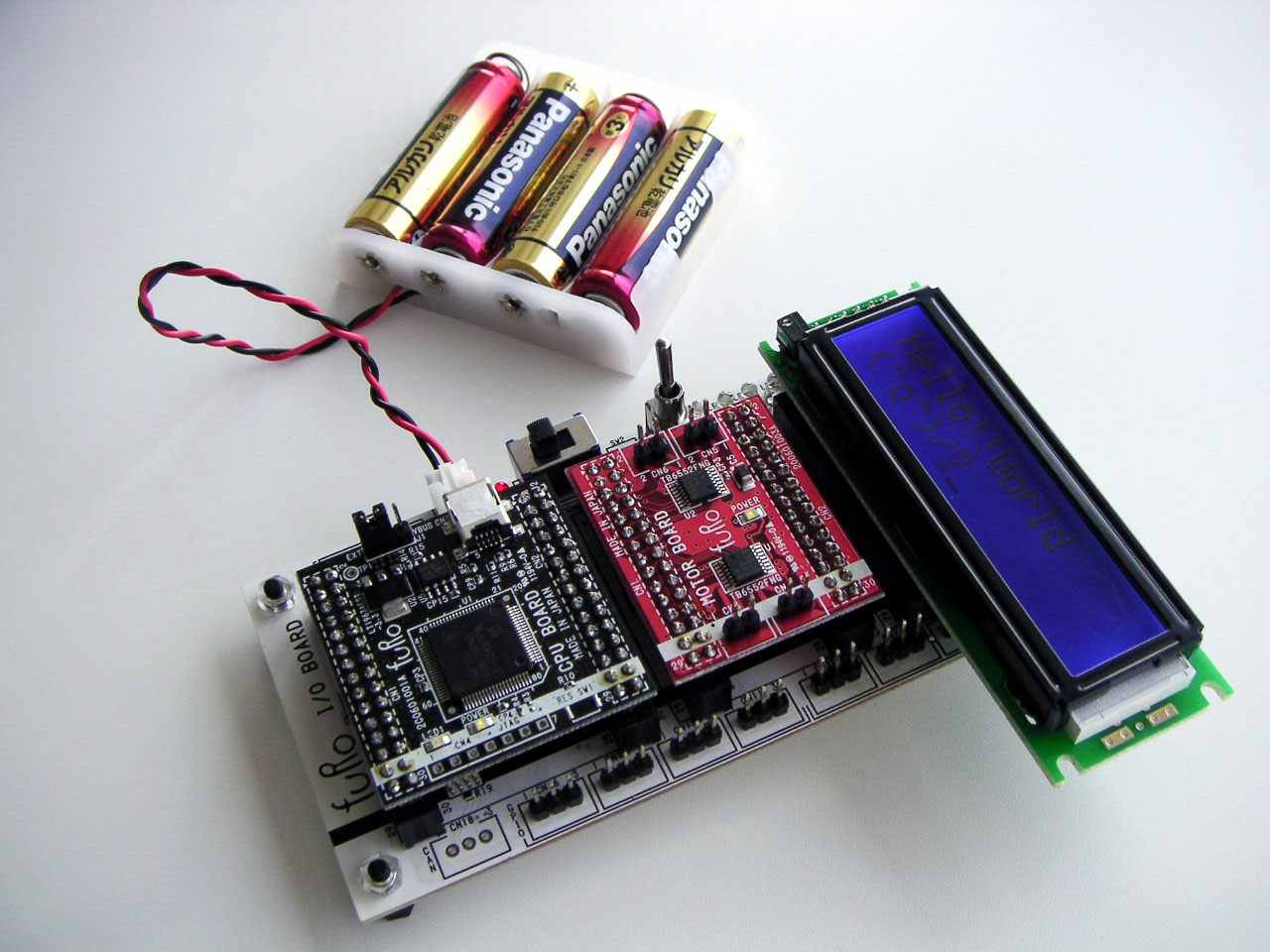
LCDパネルを動かす
LCDキャラクタディスプレイモジュールを使います。 秋月電子通商にてお手軽に買えます。型式がSC1602XXとなっているものは基本的に同じです。16文字2行表示ができて青とか緑とか種類あります。似たものでSC2004XXというのがあります。20文字4行表示できます。電源ピンの配線が違いますので注意してください。しかし、少しの配線修正とプログラムの修正で使うことは可能です。
ハードウエア編
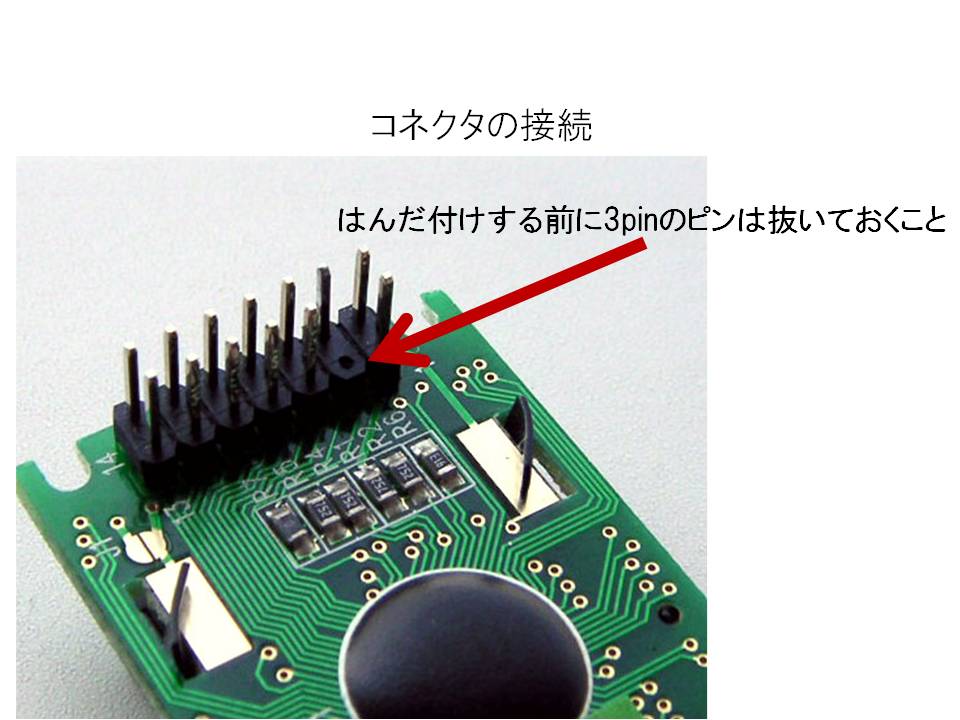
ヘッダピンの"3"PINを引き抜いてからコネクタをSC1602bにはんだ付けしてください。
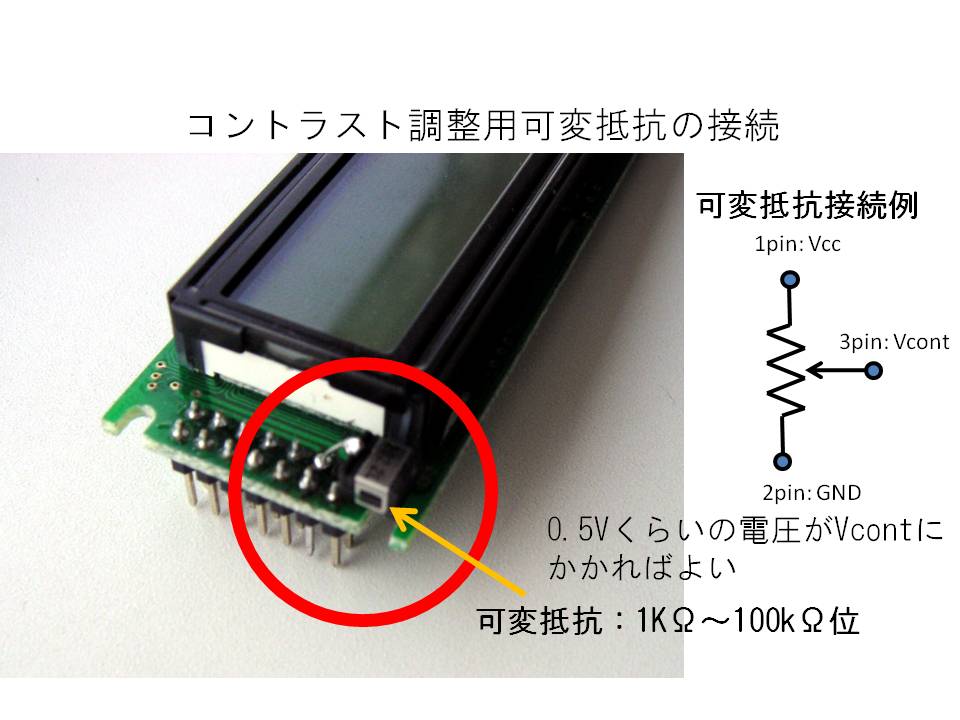
図のようにここでは可変抵抗を直接接続しました。"3PIN"は液晶のコントラスト調整のピンになります。0.5Vくらいの電圧を入れることができれば丁度好い塩梅の液晶コントラストになります。
ソフトウエア編サンプルプログラムでは以下の機能が使えます。F28035_template_main.cを変更して使ってください。
※デフォルトで[Debug]モードでビルドされるようです。「基本プログラム編フラッシュロムに書き込む」を参照して[Release]モードでビルドしてください。ビルドエラーするようです。
I/Oボード CN16: サーボモータ
I/Oボード CN14: サーボモータ
I/Oボード CN11:BEEP
モータボード CN3: DCモータ
モータボード CN4: DCモータ
モータボード CN6: DCモータ
16個のセンサを接続(モータボード使用時にはADCINB3/4/5が使用不可)
FLASH ROMへ書き込むことができる->build時のReleaseモード対応
サンプルプログラムを実行すると以下のようにLCDに表示が出るはずです。