トラブルシューティング
◎プログラムを変更していたらプログラムにエラーがないのにある時点からビルドできなくなった。placement fails for object ".text", size 0xc29 (page 0). Available ranges: RAML0L1 size: 0xc00 unused: 0xc00 max hole: 0xc00
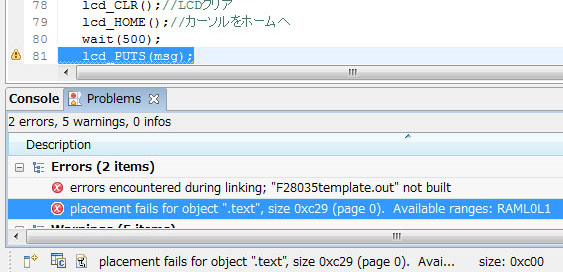
上記のエラーがでていましたら、[Debug]モードをやめて[Release]モードでビルドするようにしてください。一度フラッシュに書き込んでしまえば[Release]モードでもデバッグしていけます。[Debug]モードではマイコンのRAMにプログラムを送り込むのですがビルド結果がRAM使用容量を超えるとこのエラーが出ます。FlashROMが全くの別のメモリなのでそちらに書き込めばRAMが解放されてプログラムは動くにようになります。
◎デバッガからマイコンへのコネクション時にが接続エラーする。現在考えられる対処方法は以下
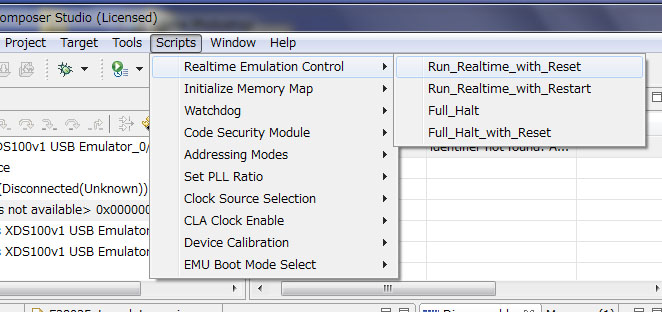
1.デバッガのリセット
[Scripts]->[Realtime Emulation Control]->[Run_Realtime_with_Reset]もしくは[Scripts]->[Realtime Emulation Control]->[Full_Fault_with_Reset]
2.CCSv4の再起動
先にUSBにマイコン接続を行ってからCCSを立ち上げなおしてください。CCS起動中にUSB認識させると接続エラーすることがあります。
◎デバッガを立ち上げることができない。Debuggerモードで[Target]->[Connect Target]が表示されない[Debug Active Project] 選択すると、デバッガを立ち上げて実行ファイルのマイコンへの転送(ロード)もいっしょに行ってくれます。 [Launch TI Debugger][Connect Target][Load Program]の三つの手順をすべてシーケンシャルに行ってくれます。 手間が省けるので慣れてきたら常時この方法をとっても良いでしょう。
◎CCSv4が立ち上がらない(エラーメッセージ:JVM terminated Exit....)これは致命的です。eclipseのメモリ関係のエラーと思われますが、現在対処方法が見つかっていません。CCSをアップデートすると起きる可能性が高いようです。一回アンインストールを行って再インストールすると復帰する可能性が高いです。健闘を祈ります