16個のセンサを接続する
ここでは16個のセンサを接続する方法を述べます。
※回路図は示しましたがここでは回路は作っていません。ADCINA2/ADCINA3のポートの使い方だけを示しました。他のポートも同じです。nolibmの回路図を参照してください。
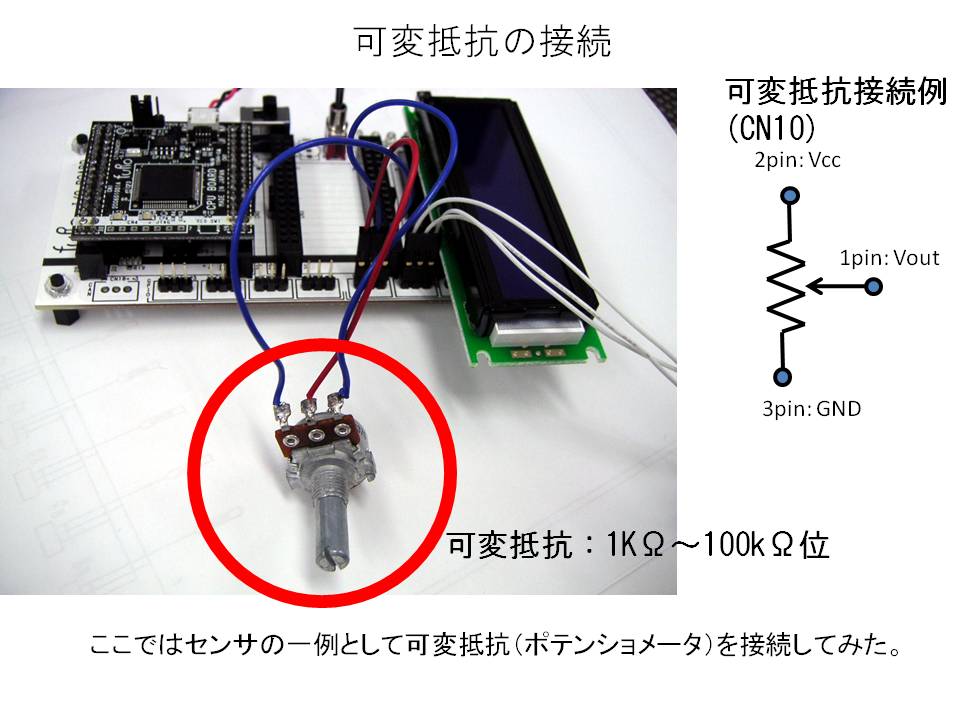
ADCをする対象としてわかりやすいのでボリュームを使った。ここで使ったのは10KΩの可変抵抗となります。プラスマイナス電極はないのでどちらでもVcc/GNDは良い。可変する真ん中のピンがADCポートにつながっていれば良い。
※デフォルトで[Debug]モードでビルドされるようです。「基本プログラム編フラッシュロムに書き込む」を参照して[Release]モードでビルドしてください。ビルドエラーするようです。
サンプルプログラムでは以下の機能が使えます。F28035_template_main.cを変更して使ってください。
I/Oボード CN16: サーボモータ
I/Oボード CN14: サーボモータ
I/Oボード CN11:BEEP
モータボード CN3: DCモータ
モータボード CN4: DCモータ
モータボード CN6: DCモータ
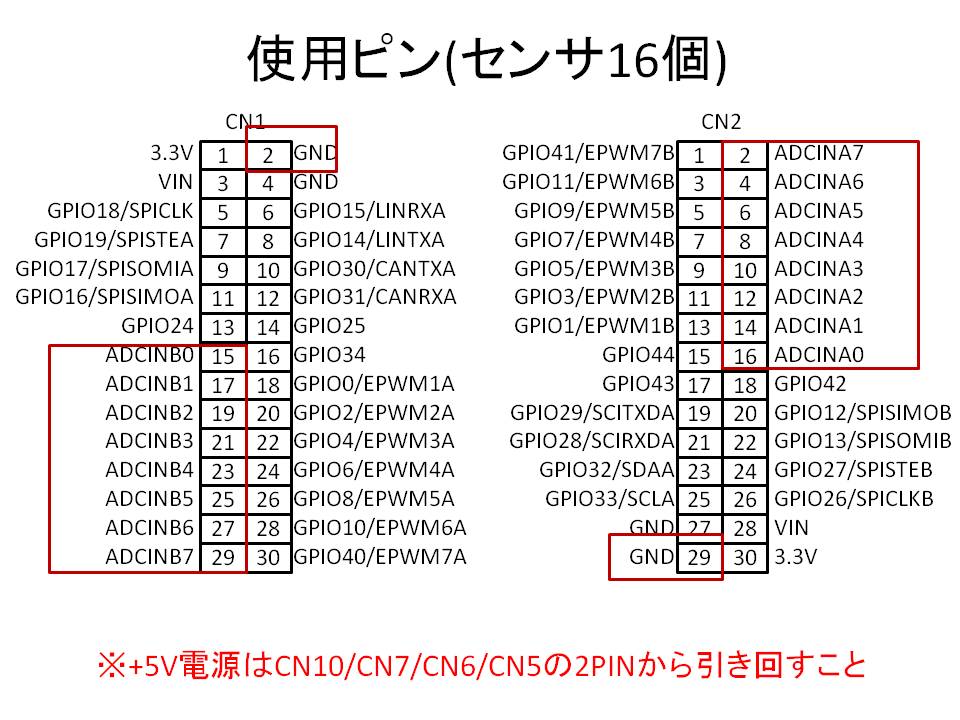
16個のセンサを接続(モータドライバ使用時はADCINB3/4/5が使用不可)
FLASH ROMへ書き込むことができる->build時のReleaseモード対応
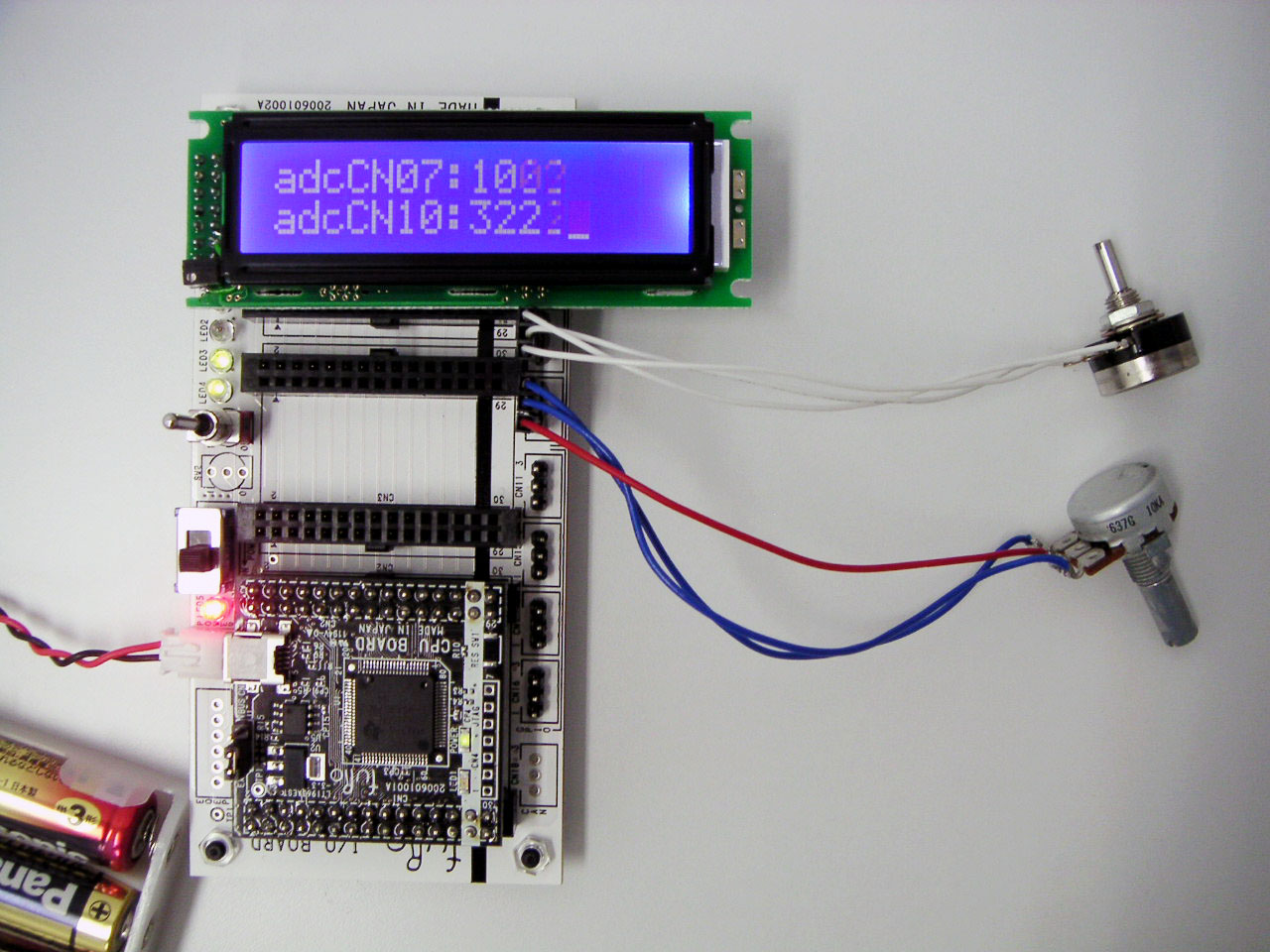
サンプルプログラムを実行すると以下のようにLCDにADC変換した値を表示します。