8個のモータを動かす
ハードウエア編モータドライバボードをもう一枚必要とします。もう一枚は上下逆刺しにします。一枚につき12V1Aのモータを4つまで駆動できます。
※ATTENTION!! 最初に配った単3電池だと電源不足になります。充電電池(エネループ6本とか、ラジコン用に売っているNiMH,NiCd,Li-Poなど電流出力特性が高いバッテリ)にするか、単2の電池(4本)に電源を交換しないとマイコンが貧血(電流不足)を起こして動きません!!(電圧にして6Vから7.2Vくらい)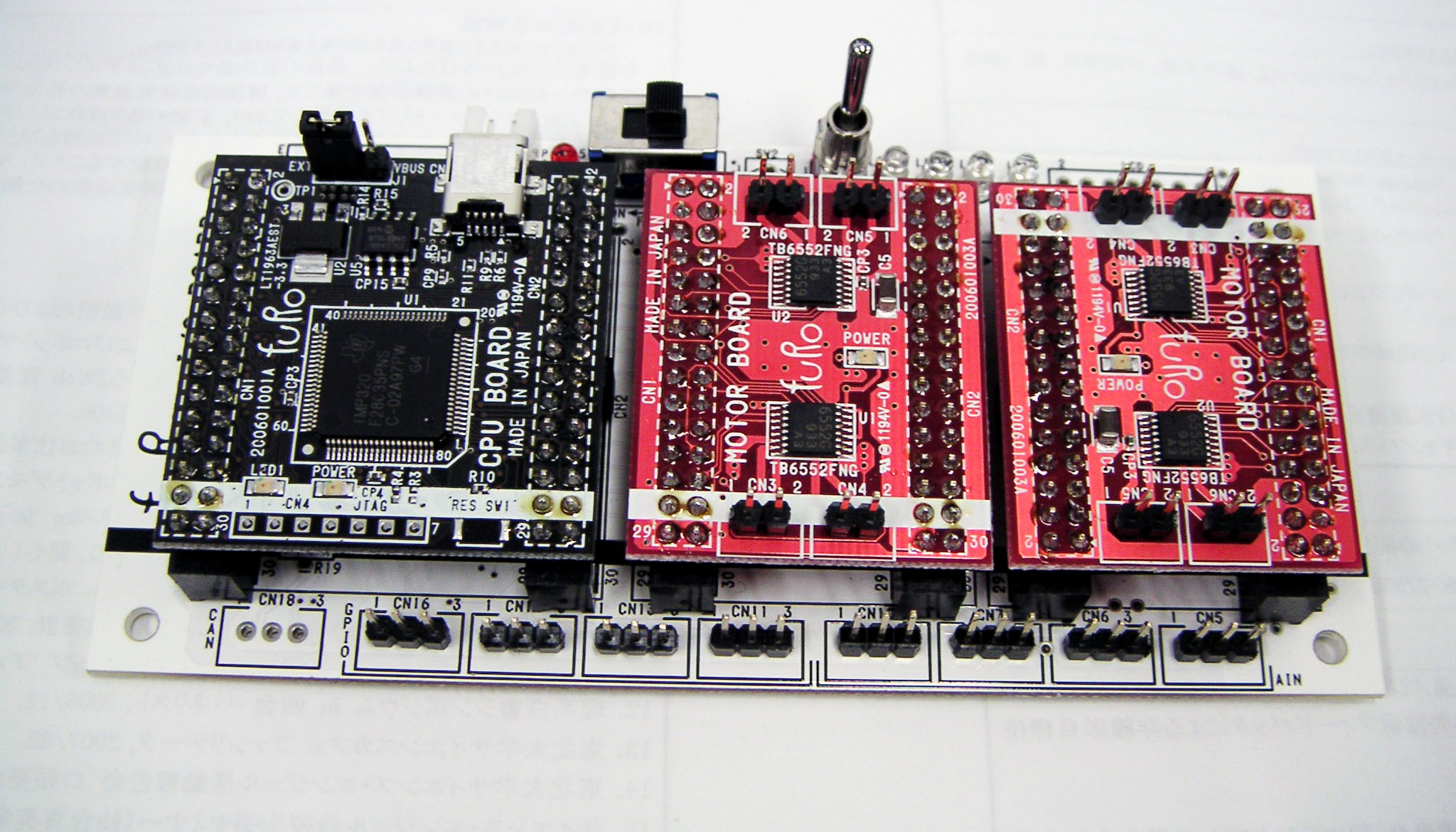
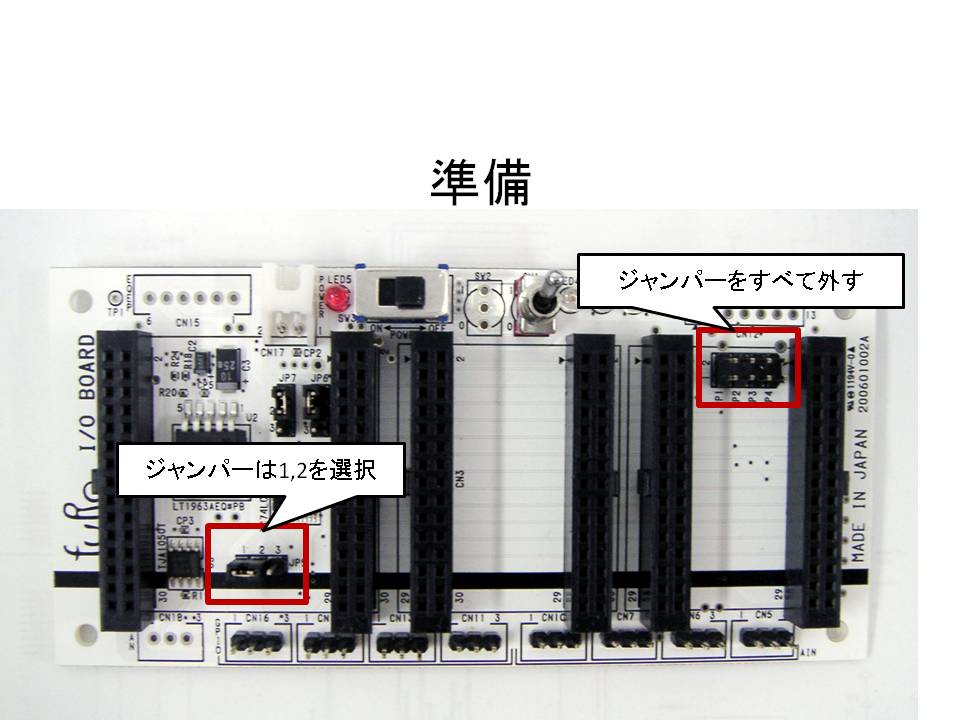
I/Oボードの準備をします。指定したジャンパーをすべて取り外す必要があります。4つのLEDは使えなくなります。
8個のモータが回せます。
※[Release]モードでビルドしてください。
このプログラムで使える機能は以下に示します。
1.16個のセンサを接続(1と同時使用はB3/4/5が使用不可、二枚目モータドライバ使用はA3/4/5も使用不可)
2.LCD表示
3.FLASH ROMへ書き込むことができる->build時のReleaseモード対応
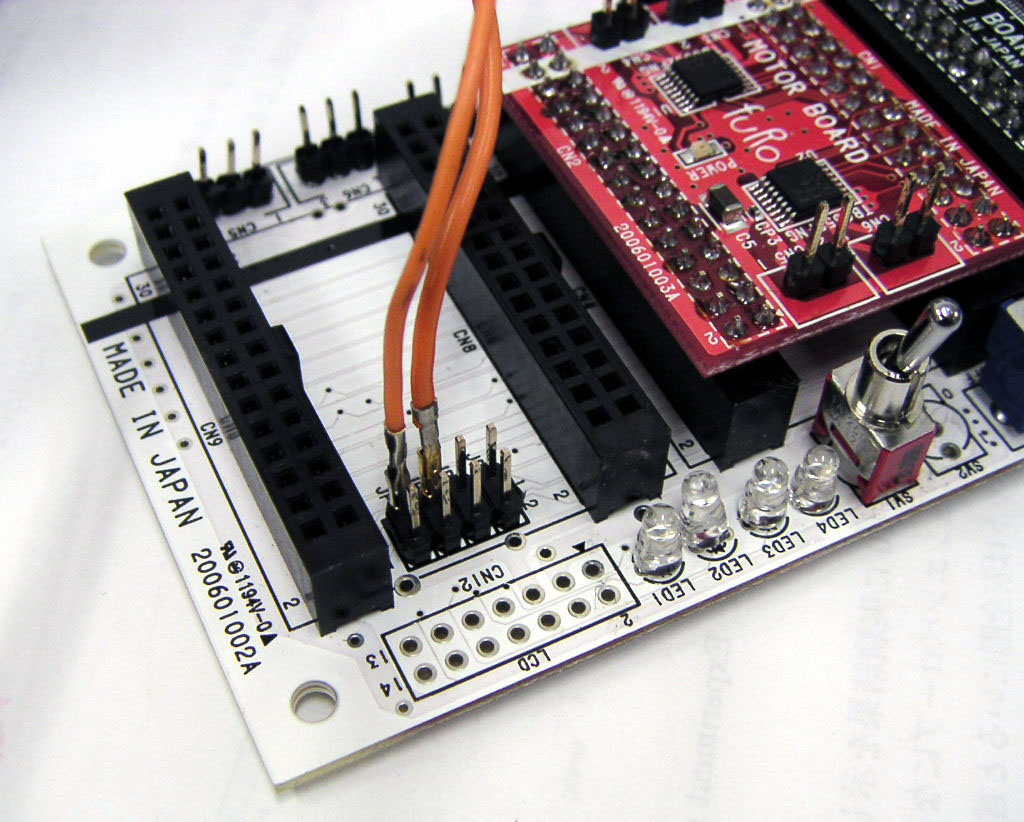
4.サーボ2個接続(JP3/JP4)モータ基板の裏側になるのでケーブル引き回しが必要になる
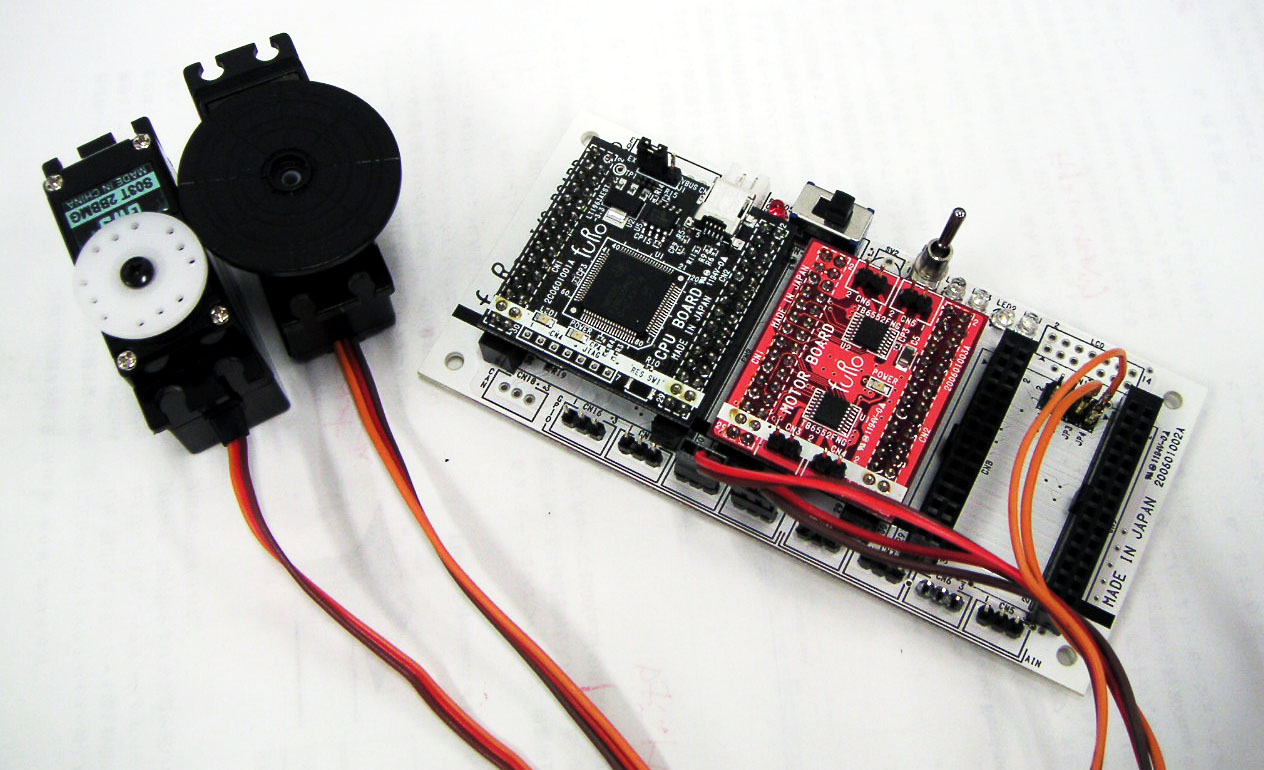
電源はCN11/CN13から引っ張ってくる。信号線(配布サーボではオレンジ)はコネクタから上手く引きぬく
信号線はJP3,1PIN/JP4,1PINに差す。実際は二枚目のモータドライバの裏側になるので工夫が必要でしょう。コネクタをペンチで90度曲げても良い。